消毒机器人 卫生防疫机器人
卫生防疫机器人
本实用新型公开了一种卫生防疫监测及救援机器人,包括轮履式机器人平台、机械手装置和监控仪,机械手装置包括机械手大臂、机械手小臂、旋转关节、机械手抓和回转关节,机械手大臂的前端通过旋转关节与机械手小臂的前端铰连接,机械手小臂的末端设有机械手抓,机械手小臂的末端处设置有正对机械手抓的摄像机;机械手小臂的一侧安装有喷头,喷头与设于底盘舱体顶板上的药水箱连通;机械手大臂的末端铰接于支架上,支架通过回转关节安装在设于底盘舱体上的安装座上;机械手大臂的中部与安装在安装座上的电动推杆相连;监控仪通过电动伸缩杆安装在支架的后侧。本实用新型可以实现现场的病毒采样,远程医疗,人员救护,甚至将已被传染人员带出疫区
1、一种卫生防疫监测及救援机器人,包括轮履式机器人平台,轮履式机器人平台包括底盘舱体(1)和设于底盘舱体(1)左右两侧的履带行走机构,其特征在于:还包括机械手装置和监控仪(20),所述的机械手装置包括机械手大臂(16)、机械手小臂(17)、旋转关节、机械手抓(18)和回转关节,所述的机械手大臂(16)的前端通过旋转关节与机械手小臂(17)的前端铰连接,机械手小臂(17)的末端设有机械手抓(18),机械手小臂(17)的末端处设置有正对机械手抓(18)的摄像机;所述的机械手小臂(17)的一侧安装有喷头(22),喷头(22)与设于底盘舱体(1)顶板上的药水箱(23)连通;所述的机械手大臂(16)的末端铰接于支架(14)上,支架(14)通过可水平方向360度无限旋转的回转关节安装在设于底盘舱体(1)顶板后端上的安装座(13)上;所述的机械手大臂(16)的中部与安装在安装座(13)上的电动推杆(15)相连;所述的监控仪(20)通过电动伸缩杆(19)安装在支架(14)的后侧。
2、根据权利要求1所述的一种卫生防疫监测及救援机器人,其特征在于:所述的监控仪(20)为红外热像仪或红外可见光双光一体化监控仪。
3、根据权利要求2所述的一种卫生防疫监测及救援机器人,其特征在于:所述的底盘舱体(1)的前端设置有激光雷达(21)。
4、根据权利要求3所述的一种卫生防疫监测及救援机器人,其特征在于:所述的底盘舱体(1)上设置有备用药水箱(11),备用药水箱(11)的侧板上开设有排药口(12);所述的备用药水箱(11)通过水泵与药水箱(23)连通。
5、根据权利要求4所述的一种卫生防疫监测及救援机器人,其特征在于:所述的底盘舱体(1)的左右两侧面板上均设置有可作为控制箱或电源箱的箱体(101),该箱体(101)的四个角均设有倒角;每个所述的箱体(101)均位于履带行走机构中底盘防腐金属履带(201)所形成的上平面和下平面之间;所述的箱体(101)与底盘防腐金属履带(201)所形成的上平面之间设置有张紧装置,所述的张紧装置包括“U”字形张紧板(102)和形成于箱体(101)两侧的滑轨板(104),所述的张紧板(102)的平板通过张紧弹簧(103)安装在箱体(101)顶板上,张紧板(102)的两侧板分别可滑动地安装在滑轨板(104)内。
6、根据权利要求5所述的一种卫生防疫监测及救援机器人,其特征在于:所述的履带行走机构包括底盘防腐金属履带(201)、底盘主动轮(202)和与底盘舱体(1)侧面板转动连接的底盘从动轮(203),所述的底盘防腐金属履带(201)套装在底盘主动轮(202)、底盘从动轮(203)上;所述的底盘主动轮(202)通过驱动轴与设于底盘舱体(1)后舱内的行走驱动减速机(6)相连,行走驱动减速机(6)与行走驱动电机(7)相连。
7、根据权利要求6所述的一种卫生防疫监测及救援机器人,其特征在于:两所述的履带行走机构外侧设有呈左右对称的两金属鳍臂,所述的金属鳍臂包括鳍臂防腐金属履带(301)、鳍臂金属支架(304)、与底盘从动轮(203)固连的鳍臂主动轮(302)和与鳍臂金属支架(304)转动连接的鳍臂从动轮(303),所述的鳍臂防腐金属履带(301)套装在鳍臂主动轮(302)、鳍臂从动轮(303)上;所述的底盘舱体(1)的前舱中间位置处设有鳍臂角度控制电机(4),所述的鳍臂角度控制电机(4)与鳍臂旋转驱动减速机(8)相连,鳍臂旋转驱动减速机(8)上插接有转轴(5);所述的转轴(5)的两端分别伸出底盘舱体(1)左右两侧面板并穿过底盘从动轮(203)和鳍臂主动轮(302)后与鳍臂金属支架(304)固连;所述的鳍臂旋转驱动减速机(8)的输出口内设有手动旋转轴(9)。
8、根据权利要求7所述的一种卫生防疫监测及救援机器人,其特征在于:所述的底盘舱体(1)的顶板上设置有背包式备用电池(24)。
9、根据权利要求8所述的一种卫生防疫监测及救援机器人,其特征在于:所述的底盘舱体(1)的左右两侧面板的前后位置处均设置有抬手柄(10),该抬手柄(10)为空心管,空心管的开口处螺纹连接有端盖。
10、根据权利要求9所述的一种卫生防疫监测及救援机器人,其特征在于:所述的支架(14)上安装有可旋转的天线(25)。
一种卫生防疫监测及救援机器人
技术领域
本实用新型涉及一种机器人,更具体地说,涉及一种卫生防疫监测及救援机器人。
背景技术
目前的卫生防疫工作主要是依靠人穿着防菌服进入病毒、细菌环境,来进行药物喷洒和进行救援,其存在一定的对人体的感染性甚至致命性,极易造成重要科研人员的感染,造成重大人员损失。目前国际上还没有专业的既能喷洒药物,又能实施救援或者病原体采样的卫生防疫机器人出现。同时,传统的疫区救援大多依靠人力来完成,此类救援人员需要同时具备专业性和较高的体力,在人力资源越来越匮乏的社会,发展卫生防疫和救援机器人已经迫在眉睫,同时,机器人可以在疫区长时间工作,起到移动监测站的作用。
发明内容
1.实用新型要解决的技术问题
本实用新型的目的在于克服上述的不足,提供了一种卫生防疫监测及救援机器人,采用本实用新型的技术方案,爬坡越障能力好,具有在高温、爆炸和强腐蚀环境下二次生存的能力,可以实现现场的病毒采样,远程医疗,人员救护,甚至将已被传染人员带出疫区。
2.技术方案
为达到上述目的,本实用新型提供的技术方案为:
本实用新型的一种卫生防疫监测及救援机器人,包括轮履式机器人平台,轮履式机器人平台包括底盘舱体和设于底盘舱体左右两侧的履带行走机构,其特征在于:还包括机械手装置和监控仪,所述的机械手装置包括机械手大臂、机械手小臂、旋转关节、机械手抓和回转关节,所述的机械手大臂的前端通过旋转关节与机械手小臂的前端铰连接,机械手小臂的末端设有机械手抓,机械手小臂的末端处设置有正对机械手抓的摄像机;所述的机械手小臂的一侧安装有喷头,喷头与设于底盘舱体顶板上的药水箱连通;所述的机械手大臂的末端铰接于支架上,支架通过可水平方向360度无限旋转的回转关节安装在设于底盘舱体顶板后端上的安装座上;所述的机械手大臂的中部与安装在安装座上的电动推杆相连;所述的监控仪通过电动伸缩杆安装在支架的后侧。
更进一步地,所述的监控仪为红外热像仪或红外可见光双光一体化监控仪。
更进一步地,所述的底盘舱体的前端设置有激光雷达。
更进一步地,所述的底盘舱体上设置有备用药水箱,备用药水箱的侧板上开设有排药口;所述的备用药水箱通过水泵与药水箱连通。
更进一步地,所述的底盘舱体的左右两侧面板上均设置有可作为控制箱或电源箱的箱体,该箱体的四个角均设有倒角;每个所述的箱体均位于履带行走机构中底盘防腐金属履带所形成的上平面和下平面之间;所述的箱体与底盘防腐金属履带所形成的上平面之间设置有张紧装置,所述的张紧装置包括“U”字形张紧板和形成于箱体两侧的滑轨板,所述的张紧板的平板通过张紧弹簧安装在箱体顶板上,张紧板的两侧板分别可滑动地安装在滑轨板内。
更进一步地,所述的履带行走机构包括底盘防腐金属履带、底盘主动轮和与底盘舱体侧面板转动连接的底盘从动轮,所述的底盘防腐金属履带套装在底盘主动轮、底盘从动轮上;所述的底盘主动轮通过驱动轴与设于底盘舱体后舱内的行走驱动减速机相连,行走驱动减速机与行走驱动电机相连。
更进一步地,两所述的履带行走机构外侧设有呈左右对称的两金属鳍臂,所述的金属鳍臂包括鳍臂防腐金属履带、鳍臂金属支架、与底盘从动轮固连的鳍臂主动轮和与鳍臂金属支架转动连接的鳍臂从动轮,所述的鳍臂防腐金属履带套装在鳍臂主动轮、鳍臂从动轮上;所述的底盘舱体的前舱中间位置处设有鳍臂角度控制电机,所述的鳍臂角度控制电机与鳍臂旋转驱动减速机相连,鳍臂旋转驱动减速机上插接有转轴;所述的转轴的两端分别伸出底盘舱体左右两侧面板并穿过底盘从动轮和鳍臂主动轮后与鳍臂金属支架固连;所述的鳍臂旋转驱动减速机的输出口内设有手动旋转轴。
更进一步地,所述的底盘舱体的顶板上设置有背包式备用电池。
更进一步地,所述的底盘舱体的左右两侧面板的前后位置处均设置有抬手柄,该抬手柄为空心管,空心管的开口处螺纹连接有端盖。
更进一步地,所述的支架上安装有可旋转的天线。
3.有益效果
采用本实用新型提供的技术方案,与已有的公知技术相比,具有如下有益效果:
(1)本实用新型的一种卫生防疫监测及救援机器人,其机械手大臂的前端通过旋转关节与机械手小臂的前端铰连接,实现机械手小臂的折叠角度变换,机械手小臂的末端设有机械手抓,机械手抓可实现旋转及开合,用于病毒采样、启闭阀门及抓取物体等救援工作,机械手小臂的末端处设置有摄像机,用于观测对准物体及手抓物体的效果,机械手小臂的一侧安装有喷头,喷头与设于底盘舱体顶板上的药水箱连通,能代替穿着防护服的卫生防疫人员,执行高危致命的药物喷洒,避免防疫人员暴露在致命病毒和细菌的环境,机械手大臂的末端铰接于支架上,支架通过可水平方向360度无限旋转的回转关节安装在设于底盘舱体顶板后端上的安装座上,可实现水平方向360度无限旋转,以便机械手抓能够水平方向360度内全方位工作,机械手大臂的中部与安装在安装座上的电动推杆相连,便于控制机械手大臂抬起及放下;
(2)本实用新型的一种卫生防疫监测及救援机器人,其监控仪通过电动伸缩杆安装在支架的后侧,能够随着支架一并旋转,摄像视角更为全面,监控仪为红外可见光双光一体化监控仪,红外可见光双光一体化监控仪内配备高性能红外热成像模块和可见光模块,能够360°全方位旋转,能实现可见光摄像与红外线热成像双重成像功能,实现机器人的昼夜工作,同时,利用红外线成像加可见光摄像机,不仅可以利用内部的红外热像仪,实现机器人的昼夜工作,还可以迅速寻找带体温的被感染人员,甚至可以通过红外热像仪的远程体温测量,测量疫区人群体温,迅速判断受灾人员是否有发热等明显被传染迹象,确定疾病扩散程度,便于制定下一步救援方案;
(3)本实用新型的一种卫生防疫监测及救援机器人,其底盘舱体的前端设置有激光雷达,确保机器人在浓烟浓雾黑夜无光环境等极度恶劣环境下快速绘制现场地图,便于制定进攻和撤退路线;
(4)本实用新型的一种卫生防疫监测及救援机器人,其底盘舱体上设置有备用药水箱,备用药水箱通过水泵与药水箱连通,备用药水箱内可以灌注有医疗杀菌药剂,通过自吸水泵,应急完成机器人杀菌防疫任务,备用药水箱的侧板上开设有排药口,用于排药清理备用药水箱;
(5)本实用新型的一种卫生防疫监测及救援机器人,其底盘舱体的左右两侧面板上均设置有可作为控制箱或电源箱的箱体,该箱体的四个角均设有倒角,替代传统中控制电路或者电池安装在底盘舱体内,使得底盘舱体内部预留出更多地使用空间,也使得维修人员能直接在外进行维修或维护,维修方便,省时省力,每个箱体均位于履带行走机构中底盘防腐金属履带所形成的上平面和下平面之间,且箱体的四个角均设有倒角,对底盘防腐金属履带起到支撑及导向的作用,为底盘防腐金属履带提供行走轨迹,确保底盘防腐金属履带不会因悬挂结构的瘫痪而使得履带失去引导;
(6)本实用新型的一种卫生防疫监测及救援机器人,其箱体与履带行走机构中底盘防腐金属履带所形成的上平面之间设置有张紧装置,用于补偿底盘防腐金属履带由于运行磨损后产生的间隙,张紧装置包括“U”字形张紧板和固定安装在箱体两侧的滑轨板,张紧板的平板通过张紧弹簧安装在箱体顶板上,结构简单,区别于传统履带系统调节前轴或者后轴的间距实现履带涨紧的传统工艺和技术,利用张紧弹簧的弹力推动张紧板上抬,自动补偿履带由于运行磨损后产生的间隙,实现对底盘防腐金属履带免维护的目的,大大提高机器人平台的可靠运行时间,降低对机器人平台维护的难度,降低使用成本,张紧板的两侧板分别可滑动地安装在滑轨板内,限定张紧板只能上下运动,避免张紧板左右晃动;
(7)本实用新型的一种卫生防疫监测及救援机器人,其两履带行走机构外侧设有呈左右对称的两金属鳍臂,履带行走机构结合金属鳍臂,使得轮履式机器人平台既可以向前向后移动,又能提高爬坡越障能力,操作灵活方便,另外由于鳍臂防腐金属履带和底盘防腐金属履带,具有耐高温,耐腐蚀的优点,在高温、爆炸和强腐蚀环境下具有二次生存的能力;
(8)本实用新型的一种卫生防疫监测及救援机器人,其底盘舱体的顶板上设置有背包式备用电池,为机器人提供应急电源,再次延长工作时间,拓展机器人行走距离;
(9)本实用新型的一种卫生防疫监测及救援机器人,其便于保险丝、紧急药物和紧急器材的携带。
附图说明
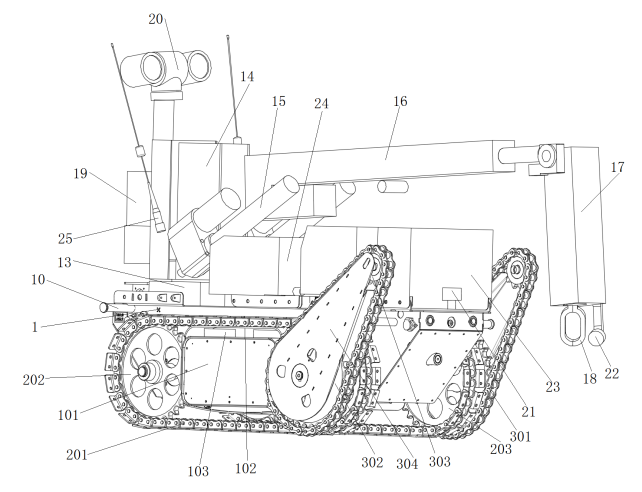
图1为本实用新型的一种卫生防疫监测及救援机器人的立体图
图2为本实用新型中轮履式机器人平台的剖视图;
图3为本实用新型中履带行走机构处的示意图;
图4为本实用新型中底盘舱体的侧视图。
示意图中的标号说明:1、底盘舱体;101、箱体;102、张紧板;103、张紧弹簧;104、滑轨板;201、底盘防腐金属履带;202、底盘主动轮;203、底盘从动轮;301、鳍臂防腐金属履带;302、鳍臂主动轮;303、鳍臂从动轮;304、鳍臂金属支架;4、鳍臂角度控制电机;5、转轴;6、行走驱动减速机;7、行走驱动电机;8、鳍臂旋转驱动减速机;9、手动旋转轴;10、抬手柄;11、备用药水箱;12、排药口;13、安装座;14、支架;15、电动推杆;16、机械手大臂;17、机械手小臂;18、机械手抓; 19、电动伸缩杆;20、监控仪;21、激光雷达;22、喷头;23、药水箱;24、备用电池;25、天线。
具体实施方式
为进一步了解本实用新型的内容,结合附图和实施例对本实用新型作详细描述。
实施例1
结合图1、图2、图3和图4,本实施例的一种卫生防疫监测及救援机器人,包括轮履式机器人平台,包括底盘舱体1和设于底盘舱体1左右两侧的履带行走机构,本实施例中底盘舱体1的前后两侧面均为向内倾斜的斜面,提高机器人平台的越障能力;为了便于搬运底盘舱体1,底盘舱体1的左右两侧面板的前后位置处均设置有抬手柄10,而为了方便携带保险丝、紧急药物以及紧急器材,抬手柄10为空心管,空心管的开口处螺纹连接有端盖;履带行走机构包括底盘防腐金属履带201、底盘主动轮202和与底盘舱体1侧面板转动连接的底盘从动轮203,底盘防腐金属履带201具有耐高温,耐腐蚀的优点,在高温、爆炸和强腐蚀环境下具有二次生存的能力,本实施例中底盘防腐金属履带201为可以增加齿块或橡胶垫的带孔履带,根据使用环境的不同,增加齿块用于爬楼梯等环境,或者安装橡胶垫用于行走降噪或增大接地摩擦力;底盘防腐金属履带201套装在底盘主动轮202、底盘从动轮203上,底盘主动轮202通过驱动轴与设于底盘舱体1后舱内的行走驱动减速机6相连,行走驱动减速机6与行走驱动电机7相连;两履带行走机构外侧设有呈左右对称的两金属鳍臂,履带行走机构结合金属鳍臂,使得轮履式机器人平台既可以向前向后移动,又能提高爬坡越障能力,操作灵活方便;金属鳍臂包括鳍臂防腐金属履带301、鳍臂金属支架304、与底盘从动轮203固连的鳍臂主动轮302和与鳍臂金属支架304转动连接的鳍臂从动轮303,鳍臂防腐金属履带301具有耐高温,耐腐蚀的优点,在高温、爆炸和强腐蚀环境下具有二次生存的能力,本实施例中鳍臂防腐金属履带301为带孔履带,便于根据使用环境的不同,增加齿块用于爬楼梯等环境,或者安装橡胶垫用于行走降噪或增大接地摩擦力;鳍臂主动轮302与底盘从动轮203固连,以便鳍臂主动轮302与底盘从动轮203同时旋转,接收底盘防腐金属履带201传递过来的底盘主动轮202的动力;鳍臂防腐金属履带301套装在鳍臂主动轮302、鳍臂从动轮303上,鳍臂防腐金属履带301处于鳍臂金属支架304的外缘,用于接触地面,实现爬坡越障等功能;底盘舱体1的前舱中间位置处设有鳍臂角度控制电机4,鳍臂角度控制电机4与鳍臂旋转驱动减速机8相连,鳍臂旋转驱动减速机8上插接有转轴5;转轴5的两端分别伸出底盘舱体1左右两侧面板并穿过底盘从动轮203和鳍臂主动轮302后与鳍臂金属支架304固连,转轴5的两端与鳍臂金属支架304固连以实现同步旋转的目的,转轴5的旋转角度由鳍臂旋转驱动减速机8进行调节,而鳍臂旋转驱动减速机8的旋转可以通过鳍臂角度控制电机4带动,也可以通过在鳍臂旋转驱动减速机8上插接有手动旋转轴9,手动带动;具体地鳍臂主动轮302与底盘从动轮203通过两个轴承外套在转轴5上,在不连接底盘防腐金属履带201的情况下,可以自由旋转,在连接底盘防腐金属履带201后,成为传递底盘主动轮202动力到鳍臂从动轮303的过渡装置;
底盘舱体1的左右两侧面板上均设置有可作为控制箱或电源箱的箱体101,替代传统中控制电路或者电池安装在底盘舱体1内,使得底盘舱体1内部预留出更多地使用空间,也使得维修人员能直接在外进行维修或维护,维修方便,省时省力,每个箱体101均位于履带行走机构中底盘防腐金属履带201所形成的上平面和下平面之间,且箱体101的四个角均设有倒角,对底盘防腐金属履带201起到支撑及导向的作用,为底盘防腐金属履带201提供行走轨迹,确保底盘防腐金属履带201不会因悬挂结构的瘫痪而使得履带失去引导;箱体101与底盘防腐金属履带201所形成的上平面之间设置有张紧装置,用于补偿底盘防腐金属履带201由于运行磨损后产生的间隙,张紧装置包括“U”字形张紧板102和固定安装在箱体101两侧的滑轨板104,张紧板102的平板通过张紧弹簧103安装在箱体101顶板上,结构简单,区别于传统履带系统调节前轴或者后轴的间距实现履带涨紧的传统工艺和技术,利用张紧弹簧103的弹力推动张紧板102上抬,自动补偿履带由于运行磨损后产生的间隙,实现对底盘防腐金属履带201免维护的目的,大大提高机器人平台的可靠运行时间,降低对机器人平台维护的难度,降低使用成本,张紧板102的两侧板分别可滑动地安装在滑轨板104内,限定张紧板102只能上下运动,避免张紧板102左右晃动;
底盘舱体1的顶板上设置有机械手装置,机械手装置包括机械手大臂16、机械手小臂17、旋转关节、机械手抓18和回转关节,机械手大臂16的前端通过旋转关节与机械手小臂17的前端铰连接,实现机械手小臂17的折叠角度变换;机械手小臂17的末端设有机械手抓18,机械手抓18可实现旋转及开合,用于启闭阀门及抓取物体等救援工作;机械手小臂17的末端处设置有摄像机26,用于观测对准物体及手抓物体的效果;机械手小臂17的一侧安装有喷头22,喷头22与设于底盘舱体1顶板上的药水箱23连通,能代替穿着防护服的卫生防疫人员,执行高危致命的药物喷洒,避免防疫人员暴露在致命病毒和细菌的环境;底盘舱体1上设置有备用药水箱11,备用药水箱11通过水泵与药水箱23连通,备用药水箱11内可以灌注有医疗杀菌药剂,通过自吸水泵,应急完成机器人杀菌防疫任务,备用药水箱11的侧板上开设有排药口12,用于排药清理备用药水箱11;机械手大臂16的末端铰接于支架14上,支架14通过可水平方向360度无限旋转的回转关节安装在设于底盘舱体1顶板后端上的安装座13上,可实现水平方向360度无限旋转,以便机械手抓18能够水平方向360度内全方位工作;机械手大臂16的中部与安装在安装座13上的电动推杆15相连,便于控制机械手大臂16抬起及放下;支架14上设有可旋转的天线25,避免工作时折弯;监控仪20通过电动伸缩杆19安装在支架14的后侧,能够随着支架14一并旋转,监控视角更为全面,监控仪20为红外可见光双光一体化监控仪,能实现可见光摄像与红外线热成像双重成像功能,实现机器人的昼夜工作,同时,利用红外线成像加可见光摄像机,探测管线泄漏点、着火点或待救人员,可以通过细微的温度变化作出判断,确定最佳行走路线和救援方案;底盘舱体1的前端设置有激光雷达21,不需要任何光线,只需利用激光雷达21生成地图,进而操作机器人按照地图前进,确保机器人在浓烟浓雾黑夜无光环境等极度恶劣环境下能够进行执行任务,并顺利返回;底盘舱体1的顶板上设置有背包式备用电池24,用于了解火灾现场的气体情况,为机器人提供应急电源,再次延长工作时间,拓展机器人行走距离。
实施例2
本实施例的一种卫生防疫监测及救援机器人的基本结构同实施例1,不同之处在于:监控仪20为红外热像仪,能够通过细微的温度变化发现管线泄漏点、着火点或待救人员。
本实用新型的一种卫生防疫监测及救援机器人,爬坡越障能力好,具有在高温、爆炸和强腐蚀环境下二次生存的能力,可以实现现场的病毒采样,远程医疗,人员救护,甚至将已被传染人员带出疫区。
以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。